







TRON1 – Multi-Modal Biped Robot for Advanced Research
TRON1 LimX Dynamics is a cutting-edge, modular humanoid robot designed to accelerate reinforcement learning (RL) and robotics research. With easily swappable foot-end modes—Point, Sole, and Wheel—TRON1 LimX Dynamics offers unmatched versatility in a single platform. Featuring an open SDK, rich peripheral ports, and ready-to-use Python APIs, it’s the ideal choice for rapid prototyping, innovation, and real-world testing.

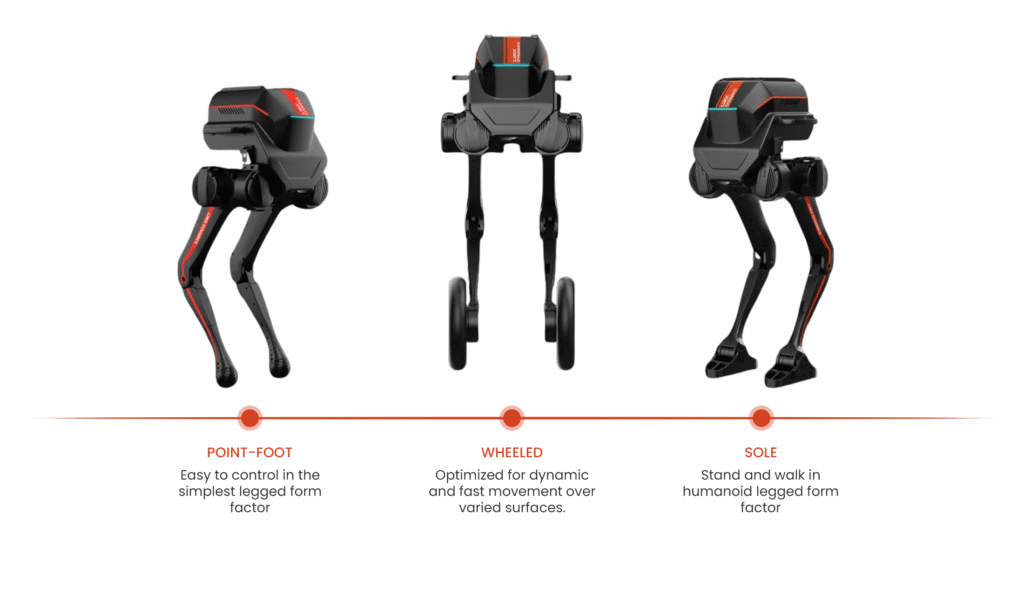
Modular Foot-End: Get 3 Modes with 1 Purchase
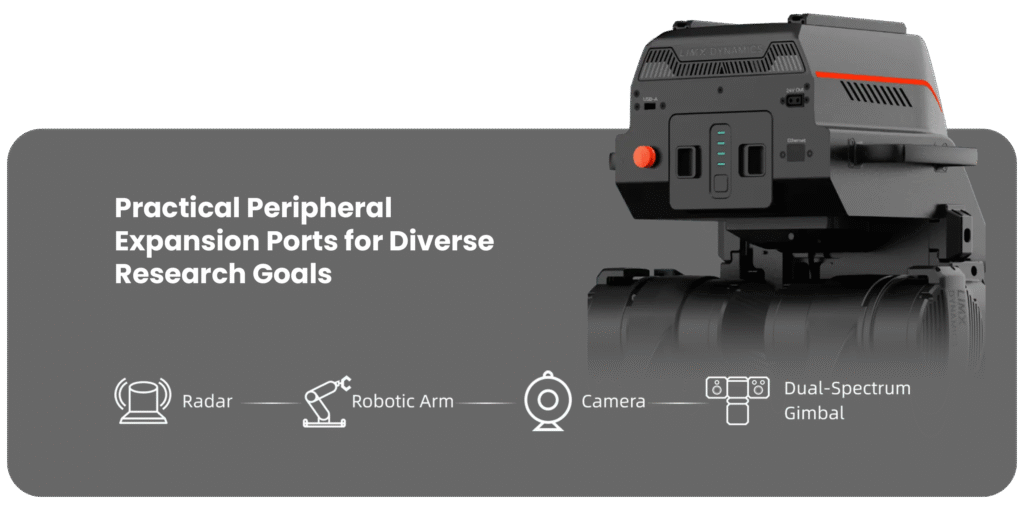
Advanced Platform: Empower Your Innovation
Ready to Use Right Out of the Box
Feature the simplicity of the bipedal structure and built-in high-performance motion control algorithms for immediate use
Quick Assembly & Disassembly Mechanism
Efficient switching of different foot-ends for flexible combinations
Automatic hardware recognition and software adaptation
Fully Open SDK and Hardware Interface
Unlock hardware potential to meet high-complexity algorithm validation
Spin up RL research
Specifications
Specifications
| Category | Details | Std. Ed. | EDU Ed. |
|---|---|---|---|
| Mechanical Parameters | Dimensions | 392mm × 420mm × 845mm | 392mm × 420mm × 845mm |
| Material | Aluminum Alloy + Industrial Plastic | Aluminum Alloy + Industrial Plastic | |
| Net Weight | ≤20kg | ≤20kg | |
| Battery Parameters | Battery Supply Voltage | 48V | 48V |
| Maximum Battery Power | 1000W | 1000W | |
| Battery Swapping | Supported | Supported | |
| Battery Type | Ternary Lithium | Ternary Lithium | |
| Battery Capacity | 240Wh (48V/5Ah) | 240Wh (48V/5Ah) | |
| Battery Range | ≥2h (At Rated Operational Conditions) | ≥2h (At Rated Operational Conditions) | |
| Charging Methods | Battery Charging, Quick Battery Swap | Battery Charging, Quick Battery Swap | |
| Charger | Battery Charging Dock | Battery Charging Dock | |
| Charging Time | <1h (20%→80%), 1.5h (100%) | <1h (20%→80%), 1.5h (100%) | |
| Performance Parameters | Load Capacity | 10kg (Maximum 15kg) | 10kg (Maximum 15kg) |
| Movement Speed | Point-Foot: <1m/s; Sole: <1m/s; Wheeled ≤5m/s | Point-Foot: <1m/s; Sole: <1m/s; Wheeled ≤5m/s | |
| Maximum Climbing Angle | ≥15° | ≥15° | |
| Maximum Obstacle Height Limitation | 15cm | 15cm | |
| Computer Specification | 12th Gen i3 / 16GB RAM / 512GB (CPU/Memory/Storage) | 12th Gen i3 / 16GB RAM / 512GB (CPU/Memory/Storage) | |
| Operating Environment | -5°C to 40°C, operates in favorable weather conditions | -5°C to 40°C, operates in favorable weather conditions | |
| Actuator Parameters | Rated Voltage (V) | 48V | 48V |
| Rated Torque (Nm) | 30Nm | 30Nm | |
| Peak Torque (Nm) | 80Nm | 80Nm | |
| Peak Motor Speed (rad/s) | 15rad/s | 15rad/s | |
| Sensor Configuration | RGBD Camera | Optional | ✔ |
| IMU | ✔ | ✔ (IMU Data Access for Developers) | |
| Extensibility | Peripheral Expansion Ports | 1×USB3.0, 1×GbE | 1×USB3.0, 1×GbE |
| Peripheral Power Supply Port | 24V, Output Power: 100W (Peak 200W) | 24V, Output Power: 100W (Peak 200W) | |
| Peripheral Mounting Point | ✔ | ✔ | |
| Handheld Remote Controller | 1 Pc | 1 Pc | |
| Remote Controller Communication Range | 50m | 50m | |
| Software Upgrade | Supported | Supported | |
| Remote E-Stop | ✔ | ✔ | |
| E-Stop Button | ✔ | ✔ | |
| Secondary Development | Supported | Supported | |
| SDK | ✔ | ✔ | |
| Developer Tools | Data Visualization Tools | ✔ | ✔ |
| Data Recording and Playback | — | ✔ | |
| Joint Control Algorithm | — | ✔ | |
| Simulation Platform | ✔ | ✔ | |
| Foot End Extension | Point-Foot | Six-DoF: environment sensing, support/step-in, incline adaptation, body height adjustment, fall recovery | Same as Std. Ed. |
| Sole | Six-DoF: environment sensing, support/step-in, incline adaptation, body height adjustment, fall recovery | Same as Std. Ed. | |
| Wheeled | Wheel-foot: forward movement, obstacle crossing, incline adaptation, body height adjustment, fall recovery | Same as Std. Ed. | |
| Others | Spare Battery | 1 (Optional) | 1 (Optional) |
| Roll Cage | 1 | 1 | |
| Accessories: Point-Foot | 1 Pair | 1 Pair | |
| Accessories: Sole | 1 Pair | 1 Pair | |
| Accessories: Wheel | 1 Pair | 1 Pair |
FAQ's
What makes TTRON1 LimX Dynamics a “multi-modal” robot?
TRON1 LimX Dynamics comes with interchangeable foot-end modules—Point, Sole, and Wheel—allowing it to adapt to different research and mobility needs in a single platform.
Is TRON1 LimX suitable for reinforcement learning (RL) experiments?
Yes, TRON1 LimX Dynamics is specifically built for RL research, with open SDK support, Python compatibility, and seamless integration with simulation environments.
Can I customize or add hardware to TRON1 LimX?
Absolutely. TRON1 LimX Dynamics includes open hardware interfaces and supports peripheral expansion like cameras, radar, robotic arms, and gimbals.
Do I need programming experience to use TRON1?
Basic programming knowledge is helpful. TRON1 LimX Dynamics comes with a Python SDK and documentation, making it easy for developers and researchers to get started.
What are some real-world applications of TRON1 LimX?
TRON1 LimX Dynamics has been deployed in research projects involving voice interaction, human-robot collaboration, smart navigation, and environment mapping.
What is the TRON1 robot designed for?
TRON1 LimX Dynamics is built as a multi-modal biped robot to support advanced research in robotics, AI, locomotion, and human–robot interaction. It provides researchers with a versatile platform to experiment with walking, balancing, manipulation, and mobility across various terrains.
Who should use the TRON1 robot?
TRON1 LimX Dynamics is ideal for universities, R&D labs, innovation centers, and enterprises focusing on robotics, AI, biomechanics, and autonomous systems.
What is the maximum payload capacity?
TRON1 LimX Dynamics can carry up to 10 kg (maximum 15 kg), enabling integration of sensors, manipulators, or other research equipment.
How long can TRON1 operate on a single charge?
Under rated conditions, TRON1 LimX Dynamics offers over 2 hours of continuous operation. Batteries are swappable for extended research sessions.

Reviews
There are no reviews yet.