

LIMX TRON 2
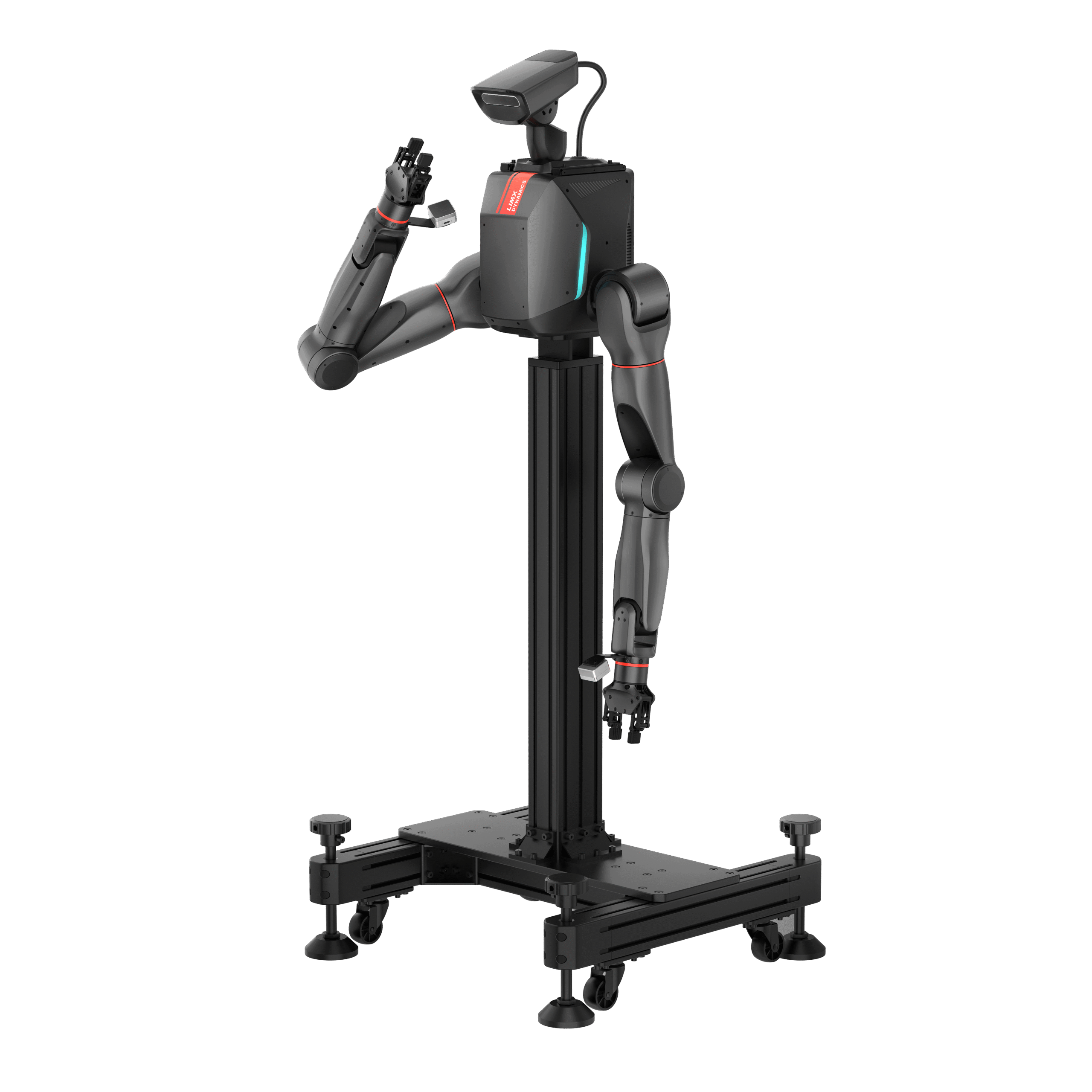
TRON 2 is a full-size humanoid robot engineered to bridge the gap between research, development, and real-world deployment. Designed with a human-scale form factor, TRON 2 delivers natural movement, precise articulation, and stable locomotion required for advanced interaction in complex environments. With 31 degrees of freedom, high-performance joint control, and a modular mechanical structure, it enables researchers and enterprises to explore human-like manipulation, balance, and mobility with confidence. The robot’s fast-swap components, customizable end-effectors, and open sensor architecture make it an ideal platform for rapid prototyping, experimentation, and long-term scalability across diverse robotics applications.
Built for modern AI and robotics workflows, TRON 2 integrates multi-sensor perception, depth vision, and a self-developed IMU system to ensure accurate environmental awareness and motion stability. Its Python-based development environment, modular SDK, and low-level motor APIs provide full control from algorithm design to physical execution. With seamless Sim-to-Real compatibility and support for leading simulation platforms, TRON 2 accelerates learning, testing, and deployment cycles. Whether used in academic research, industrial automation, or embodied AI development, TRON 2 stands as a powerful, flexible, and future-ready humanoid robotics platform.
Human-Scale Design & Build Quality

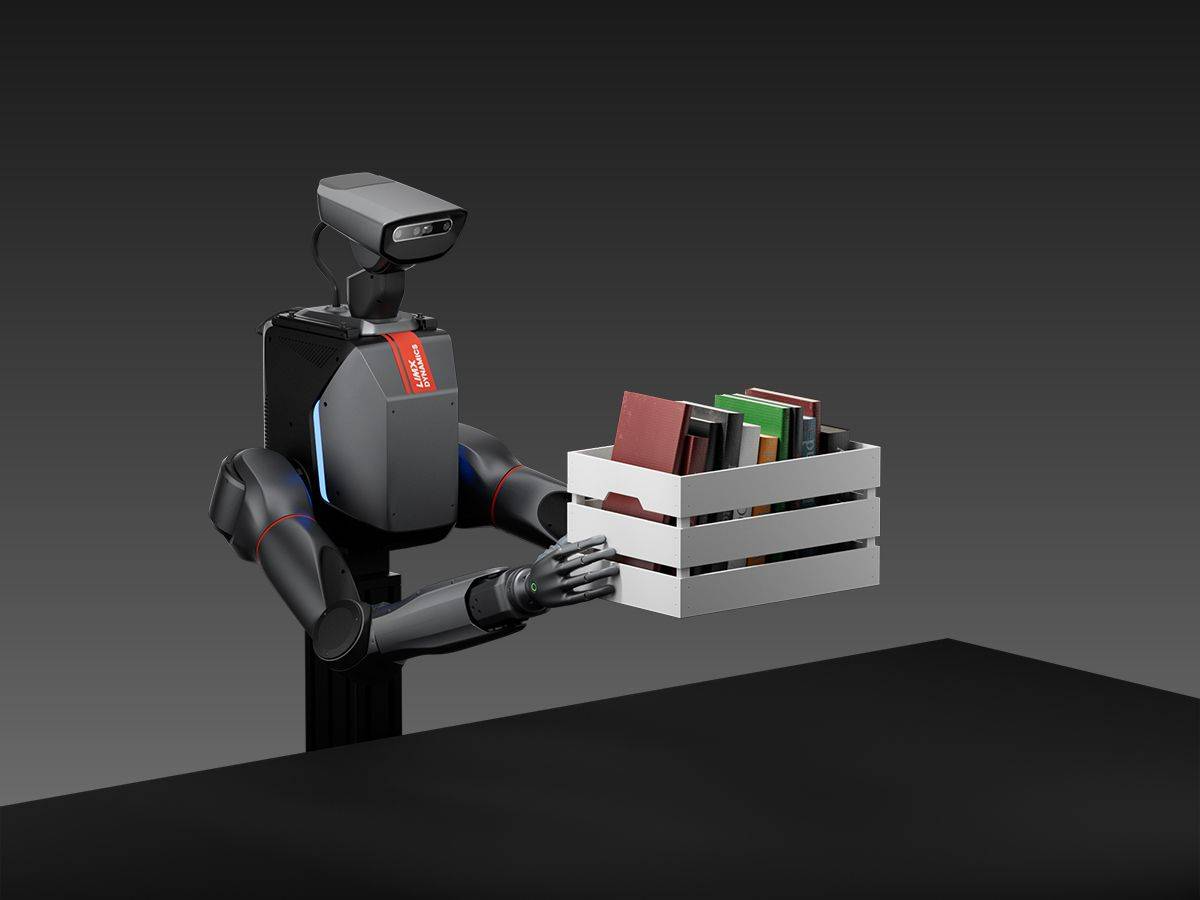
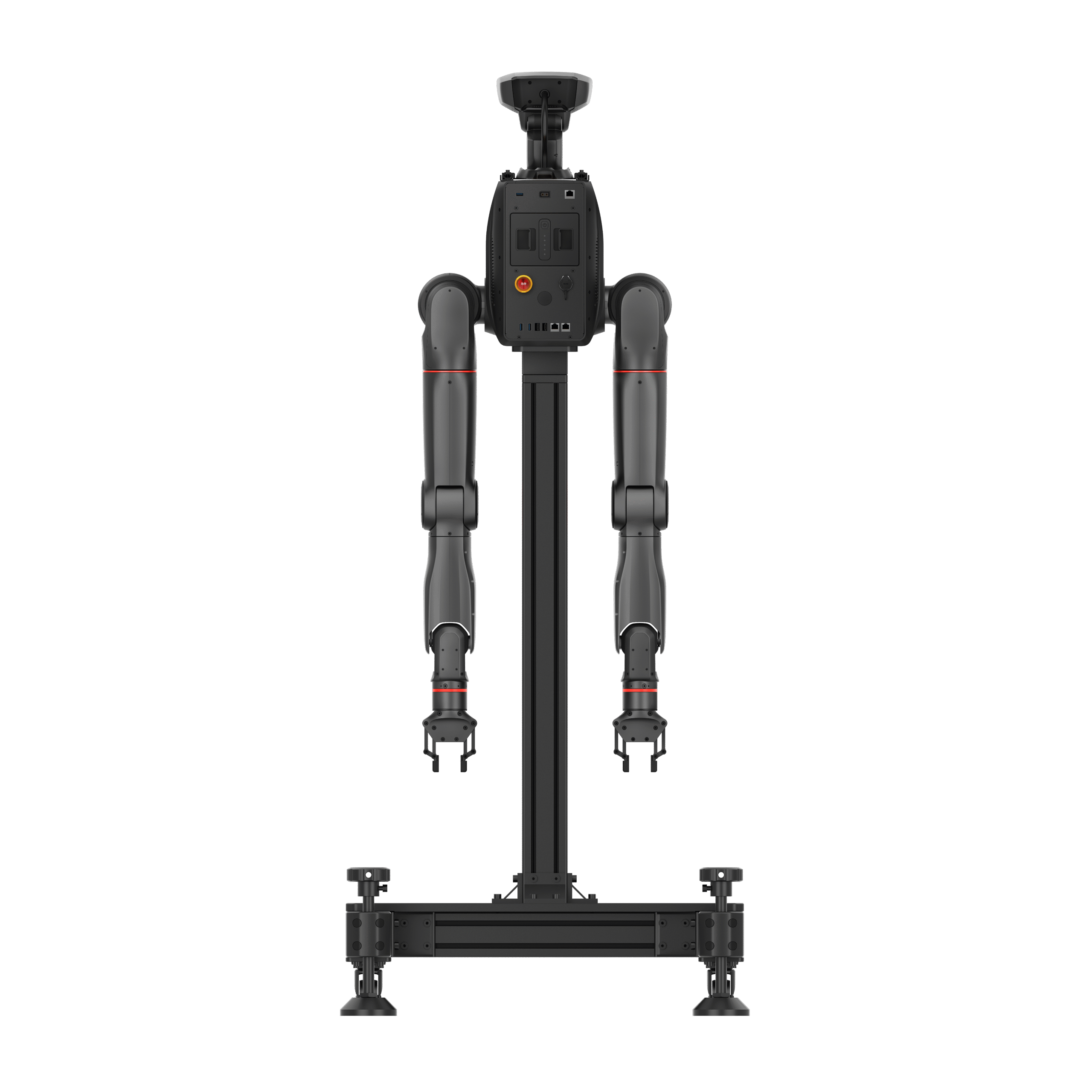
Human-scale design is a defining strength of TRON 2, allowing the robot to operate naturally within environments built for people. With proportions that closely match an average adult, the platform can reach standard work surfaces, navigate human-oriented spaces, and interact with tools and objects without requiring environmental modifications. This realistic scale makes it especially valuable for research and development focused on human–robot interaction, manipulation, and mobility in real-world settings. By maintaining a balanced height-to-weight ratio, the humanoid achieves stable locomotion while preserving agility during dynamic movements such as turning, bending, and coordinated arm–leg actions, reinforcing why TRON 2 is a preferred choice for advanced robotics projects.
Build quality is another area where this humanoid platform stands out. The structure is engineered using durable materials and precision-manufactured joints that support smooth motion and long-term operation. A modular mechanical design allows key components to be removed or replaced quickly, reducing downtime and simplifying maintenance. This approach also enables rapid upgrades as hardware evolves or project requirements change. Attention to structural integrity, joint alignment, and load distribution ensures consistent performance during extended use. Together, the human-scale form factor and solid construction create a dependable foundation for advanced robotics research, testing, and deployment across a wide range of applications.
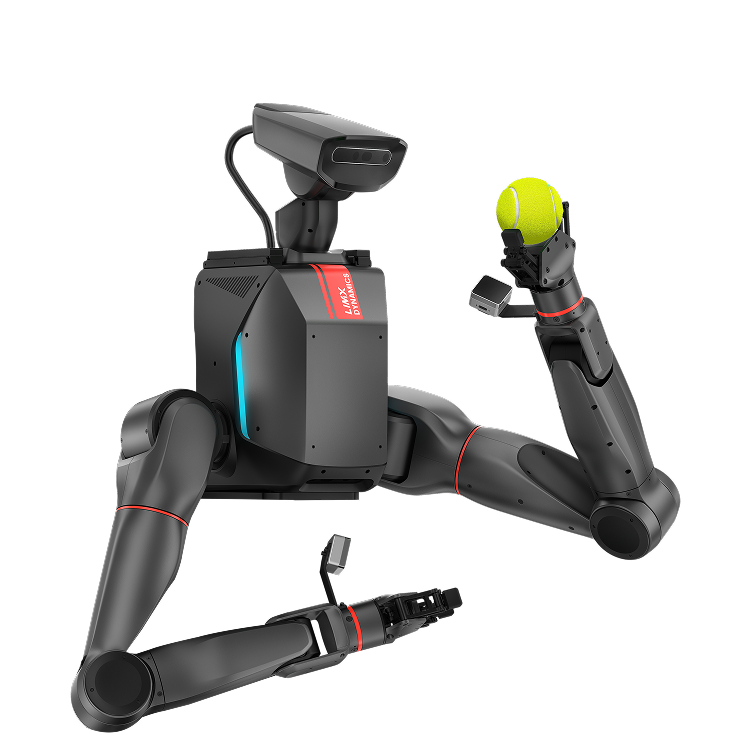
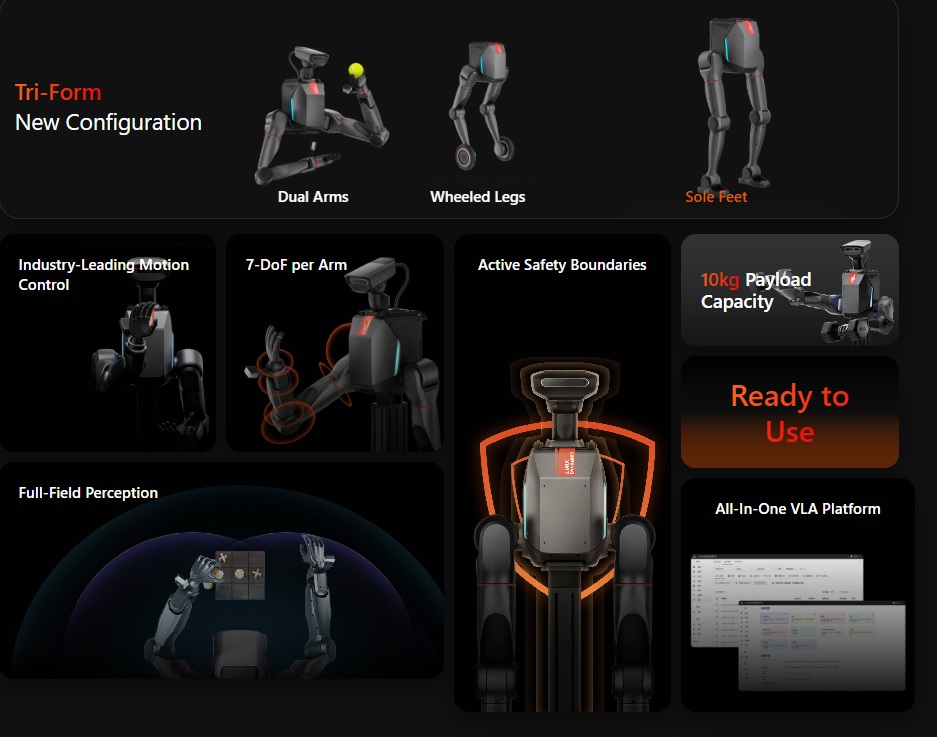
Dual Arms Unlocking VLA Efficiency
Full Coverage Camera Vision
10 Kg Dual-Arm Payload
Industry-Leading Motion Control
100ms Teleoperation Latency
Key Features
| Feature Category | Details |
|---|---|
| Robot Type | Full-size humanoid robot |
| Height & Weight | 165 cm tall, approx. 55 kg |
| Degrees of Freedom | 31 DoF for full-body articulation |
| Arms | Dual 7-DoF arms for precise manipulation |
| Legs | Dual 6-DoF legs for walking, balance, and dynamic motion |
| Waist & Head | 3-DoF waist and 2-DoF head for posture and perception control |
| Mechanical Design | Modular, fast-swap architecture |
| End-Effectors | Support for humanoid hands, grippers, and tool interfaces |
| Inertial Sensing | Self-developed IMU for motion stability |
| Vision System | Intel® RealSense™ D435i depth cameras (head & torso) |
| Sensor Expansion | Supports LiDAR, RGB cameras, and external modules |
| Perception | Multi-sensor fusion framework |
| Software Environment | Python-based development support |
| Control Access | Modular SDK with low-level motor APIs |
| Simulation Support | NVIDIA Isaac Sim, MuJoCo, Gazebo compatible |
| Sim-to-Real | Zero-gap URDF for seamless transfer |
| Connectivity | Gigabit Ethernet, USB 3.0 / 3.2 ports |
| Use Focus | Robotics R&D, AI training, humanoid research |
Locomotion, Balance, and Stability Systems
Locomotion, balance, and stability are core capabilities that define the real-world performance of TRON 2. Designed with a human-like lower-body structure and six degrees of freedom in each leg, the robot is capable of smooth walking, controlled turning, and stable stance across varied surfaces. Its joint configuration allows coordinated motion between the legs, waist, and upper body, enabling natural gait patterns that closely resemble human movement.
Stability in TRON 2 is further enhanced through a combination of precise motor control, optimized weight distribution, and a self-developed IMU system that continuously monitors orientation and motion. Real-time feedback from inertial and joint sensors allows the control system to make rapid adjustments, maintaining balance during transitions such as starting, stopping, or changing direction.
Specifications
| Specification | Details |
|---|---|
| Product Name | TRON 2 |
| Robot Type | Full-size humanoid robot |
| Height | Approx. 165 cm |
| Weight | Approx. 55 kg |
| Degrees of Freedom | 31 DoF |
| Arm Configuration | 2 × 7-DoF arms |
| Leg Configuration | 2 × 6-DoF legs |
| Waist | 3 Degrees of Freedom |
| Head | 2 Degrees of Freedom |
| Locomotion | Bipedal walking with dynamic balance control |
| End-Effector Support | Humanoid hands, grippers, tool interfaces |
| IMU System | Self-developed inertial measurement unit |
| Vision Sensors | Intel® RealSense™ D435i depth cameras (head & torso) |
| Sensor Expansion | LiDAR, RGB cameras, external modules supported |
| Perception System | Multi-sensor fusion framework |
| Software Environment | Python-based development support |
| SDK & Control | Modular SDK with low-level motor APIs |
| Simulation Compatibility | NVIDIA Isaac Sim, MuJoCo, Gazebo |
| Sim-to-Real Support | Zero-gap URDF model |
| Connectivity | Gigabit Ethernet, USB 3.0 / 3.2 |
| Application Focus | Robotics R&D, humanoid research, AI training |
FAQs
What is TRON 2 designed for?
It is a full-size humanoid robot developed for robotics research, AI training, simulation-to-real learning, and advanced human–robot interaction studies.
How many degrees of freedom does TRON 2 have?
TRON 2 features 31 degrees of freedom, enabling smooth, precise, and human-like full-body movement.
Can TRON 2 walk and maintain balance independently?
Yes, it is designed for bipedal locomotion with dynamic balance control supported by real-time sensor feedback.
What kind of end-effectors does TRON 2 support?
TRON 2 supports customizable end-effectors including humanoid hands, grippers, and tool interface options.
Which sensors are integrated into TRON 2?
The robot TRON 2 includes a self-developed IMU system and Intel® RealSense™ D435i depth cameras on the head and torso, with support for additional external sensors.
Is TRON 2 compatible with robotics simulation platforms?
Yes, TRON 2 supports NVIDIA Isaac Sim, MuJoCo, Gazebo, and other leading robotics simulators through a zero-gap URDF model.
What programming languages are supported?
The robot offers a Python-based development environment along with low-level motor APIs for advanced control.
Can TRON 2 be upgraded or modified over time?
Yes, the robot is modular, fast-swap architecture allows easy hardware upgrades, maintenance, and customization.
What industries or users is TRON 2 best suited for?
TRON 2 is ideal for universities, research labs, robotics startups, and enterprises working on humanoid robotics and embodied AI.
How does TRON 2 support Sim-to-Real deployment?
The robot uses a physics-aligned, zero-gap URDF model to ensure seamless transfer of learned behaviors from simulation to real-world operation.





Reviews
There are no reviews yet.